Smart Parking Lot
Simulate an autonomous parking lot, the gate opens and close automatically, number of available parking space is displayed on the FutureBoard.
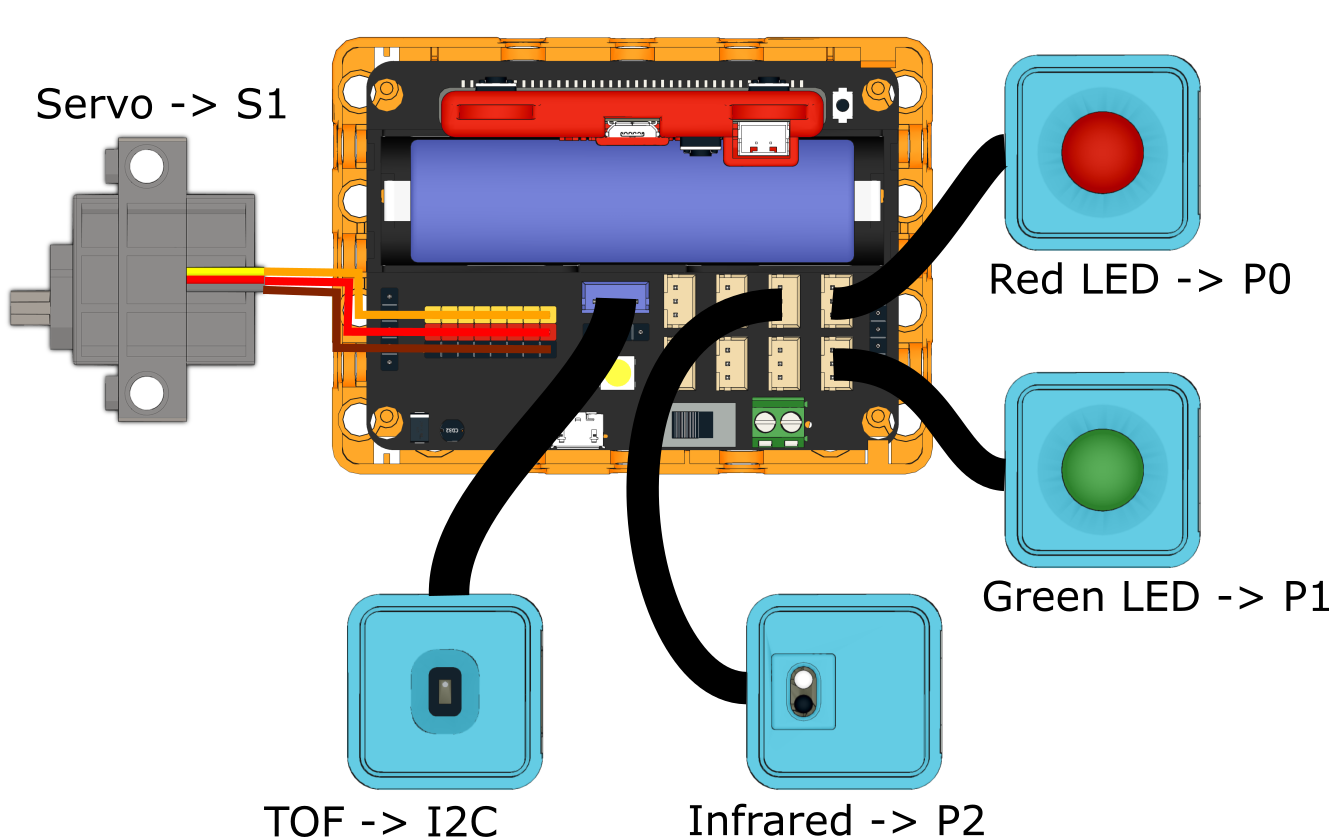
Building Instructions
Building Instructions(Right Click->Save As)
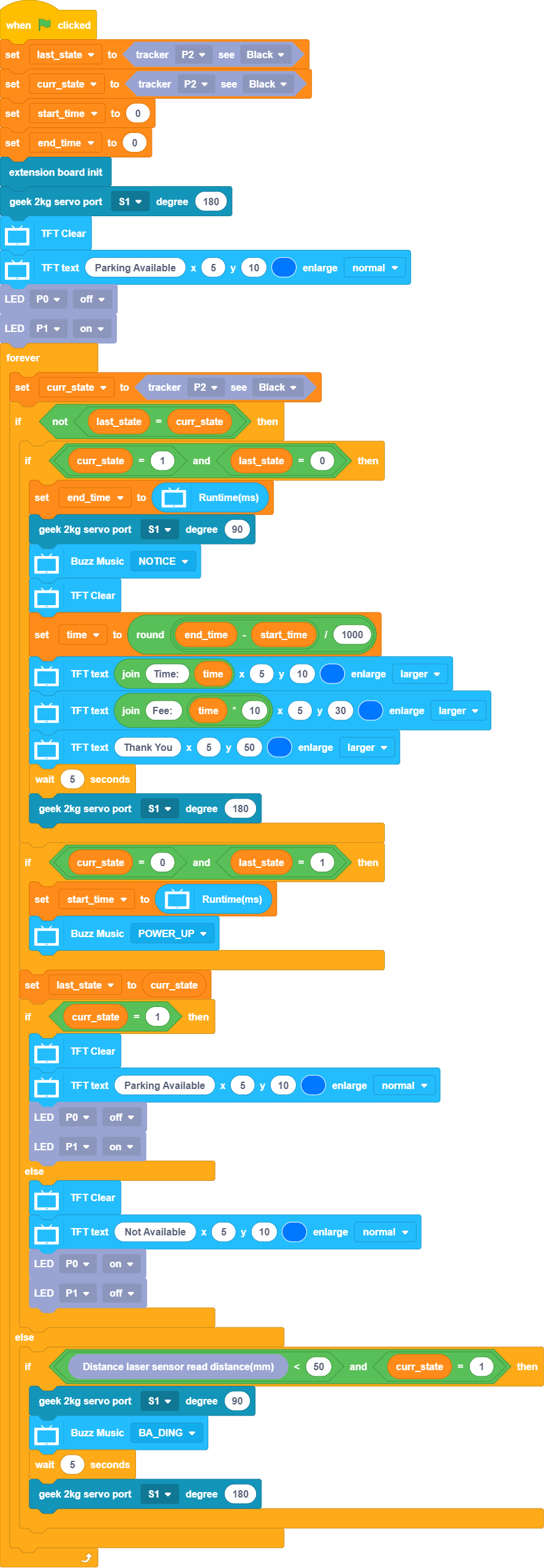
Sample Program
KittenBlock Sample Program
Python Sample Program
#/bin/python
from time import sleep
from future import *
from sugar import *
import robotbit
import time
x = 0
last_state = 0
curr_state = 0
start_time = 0
end_time = 0
time = 0
last_state = Tracker("P2").value() == 1
curr_state = Tracker("P2").value() == 1
start_time = 0
end_time = 0
robot = robotbit.RobotBit()
robot.geekServo2kg(1, 180)
screen.clear()
screen.text(str("Parking Available"),5,10,1,(0, 119, 255))
LED("P0").state('OFF')
LED("P1").state('ON')
while True:
curr_state = Tracker("P2").value() == 1
if not last_state == curr_state:
if curr_state == 1 and last_state == 0:
end_time = time.ticks_ms()
robot.geekServo2kg(1, 90)
buzzer.melody(NOTICE)
screen.clear()
time = (round((end_time - start_time) / 1000))
screen.text(str(str("Time: ")+str(time)),5,10,2,(0, 119, 255))
screen.text(str(str("Fee: ")+str(time * 10)),5,30,2,(0, 119, 255))
screen.text(str("Thank You"),5,50,2,(0, 119, 255))
sleep(5)
robot.geekServo2kg(1, 180)
if curr_state == 0 and last_state == 1:
start_time = time.ticks_ms()
buzzer.melody(POWER_UP)
last_state = curr_state
if curr_state == 1:
screen.clear()
screen.text(str("Parking Available"),5,10,1,(0, 119, 255))
LED("P0").state('OFF')
LED("P1").state('ON')
else:
screen.clear()
screen.text(str("Not Available"),5,10,1,(0, 119, 255))
LED("P0").state('ON')
LED("P1").state('OFF')
else:
if TOFDistance().value() < 50 and curr_state == 1:
robot.geekServo2kg(1, 90)
buzzer.melody(BA_DING)
sleep(5)
robot.geekServo2kg(1, 180)
Program Instructions
The gate opens when a car drives up to the entrance. When a car is parked in the parking spot, the red light turns on at the entrance to signify a full parking lot, the system will also refuse to let in any car.
When the car occupying the parking space drives away, the FutureBoard will display the parking fee and opens the gate.