NekoUltraSound Sensor
NekoUltraSound Sensor (HKBM8014A)

This is an ultra sound distance sensor.
Specification
Voltage: 5V
Working Tempeature: -25 ~ +80°C
Signal Span: 30° Arc
Detection Range: 5~300cm (Error<1cm)
Interface: 4Pin Dupont Cable
Wiring Diagram
The Ultra Sound sensor must connect to 5V.
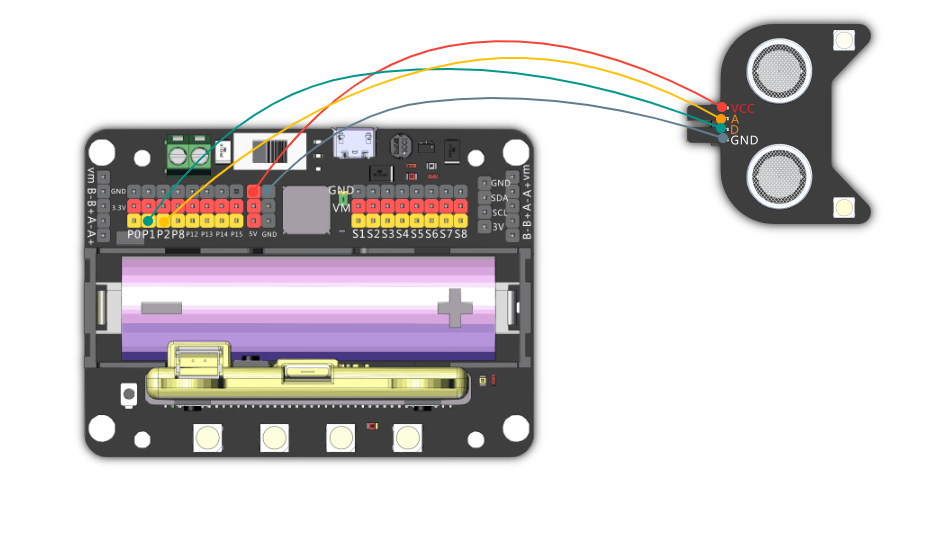
Ultra Sound Sensor V2
Connect the A(RGB LED) and D(Sensor) pin of Ultra Sound Sensor V2.
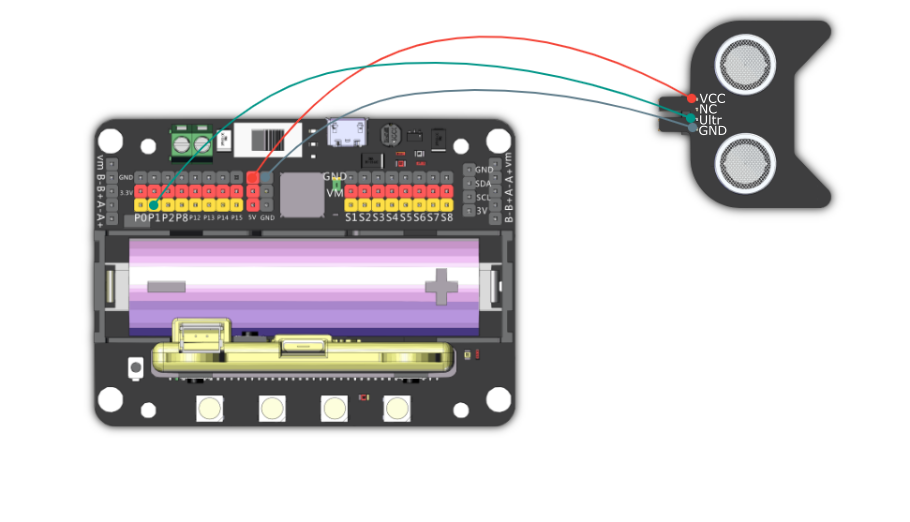
Ultra Sound Sensor V1
Connect the Ultr pin of Ultra Sound Sensor V1.
MakeCode Coding Tutorial


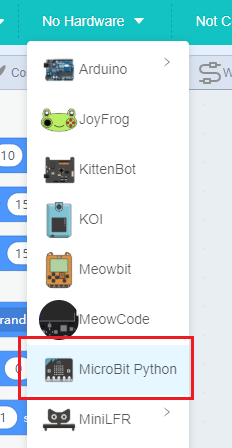
This module can be used with Microbit and Meowbit.
Microbit:
Load Robotbit Extension: https://github.com/KittenBot/pxt-robotbit
How to load extension?
Ultra Sound Sensor blocks:
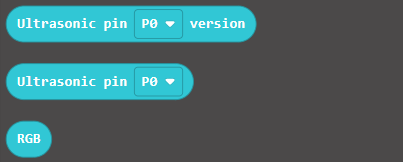
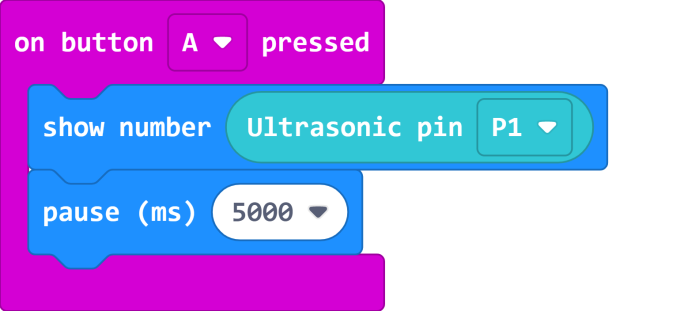
Reading the distance:
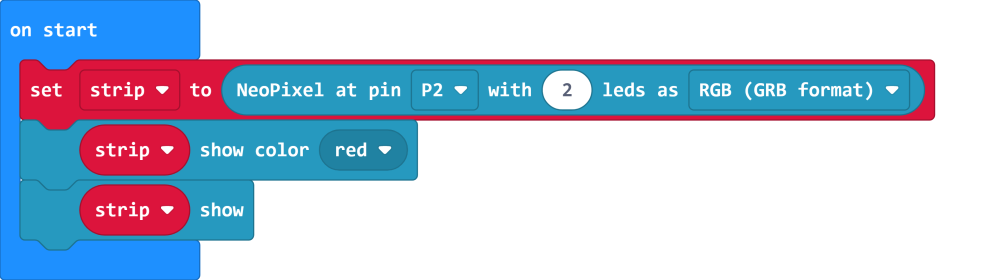
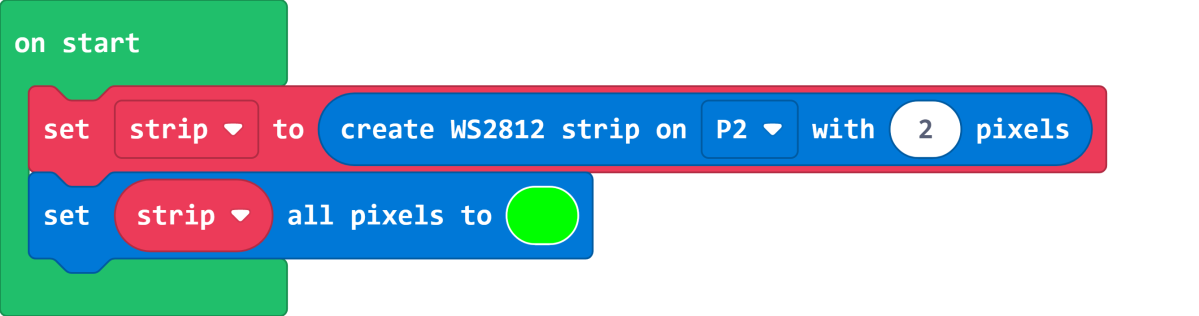
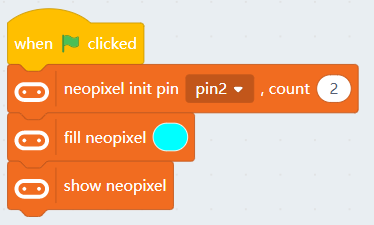
Controlling the RGB LED(only for V2):
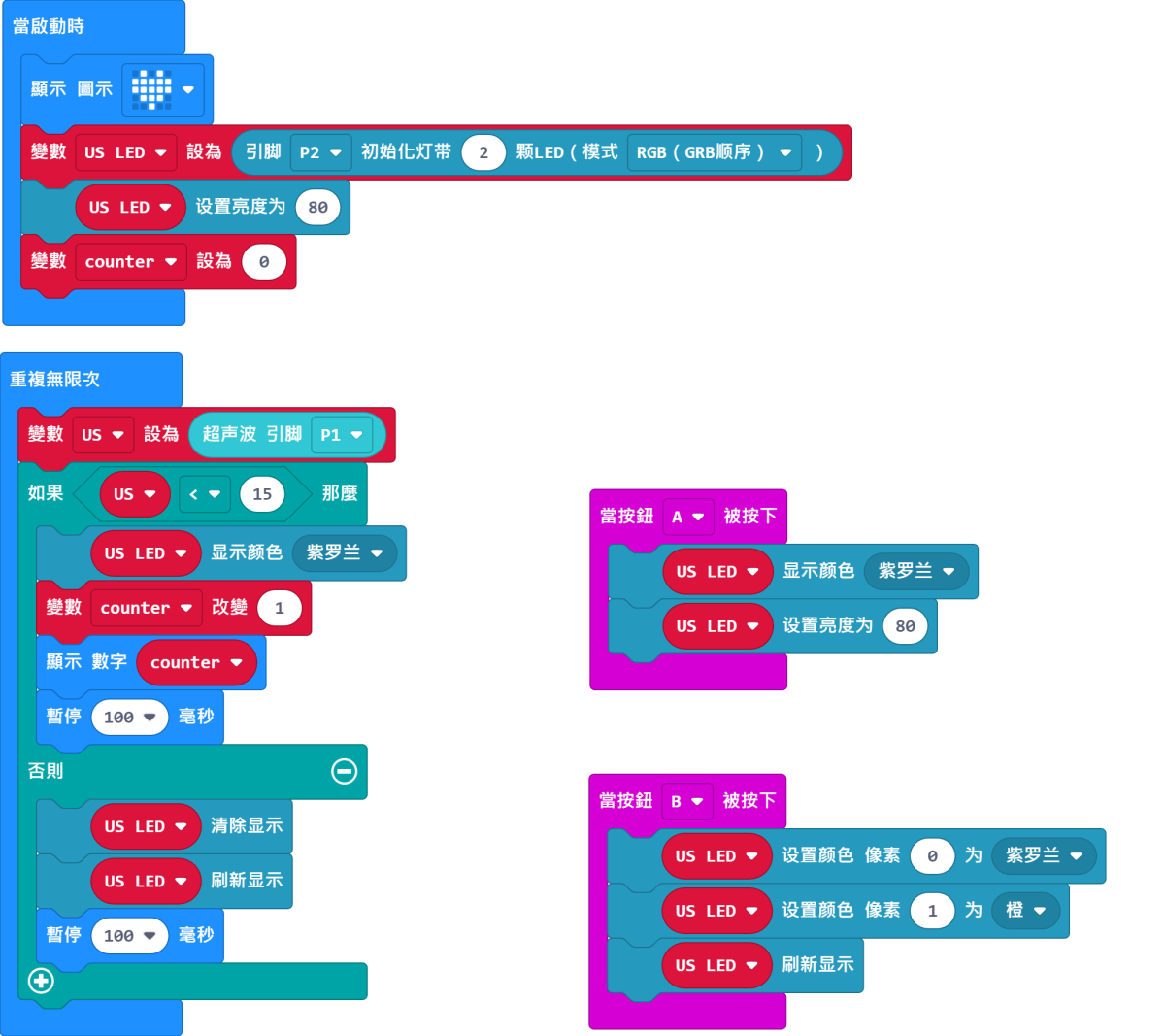
Demo Case:
Meowbit:
Load Robotbit Extension: https://github.com/KittenBot/meow-robotbit
How to load extension?
Load NeoPixel Extension:
![]()
Ultra Sound Sensor Blocks:
Reading the distance:
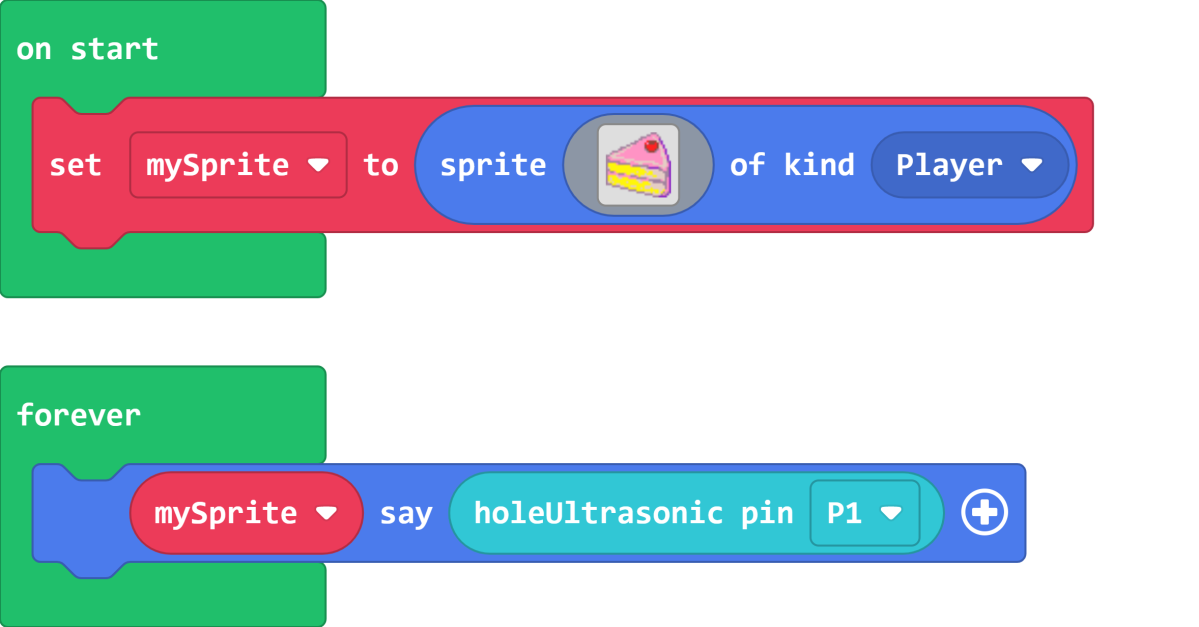
Controlling the RGB LED(only for V2):
Extension Version and Updates
There may be updates to extensions periodically, please refer to the following link to update/downgrade your extension.
KittenBlock Coding Tutorial

Load Robotbit extension
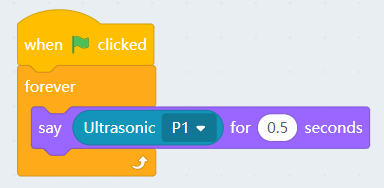
Reading the distance:
Controlling the RGB LED(only for V2):
Mu Editor Coding Tutorial
Reading the distance:
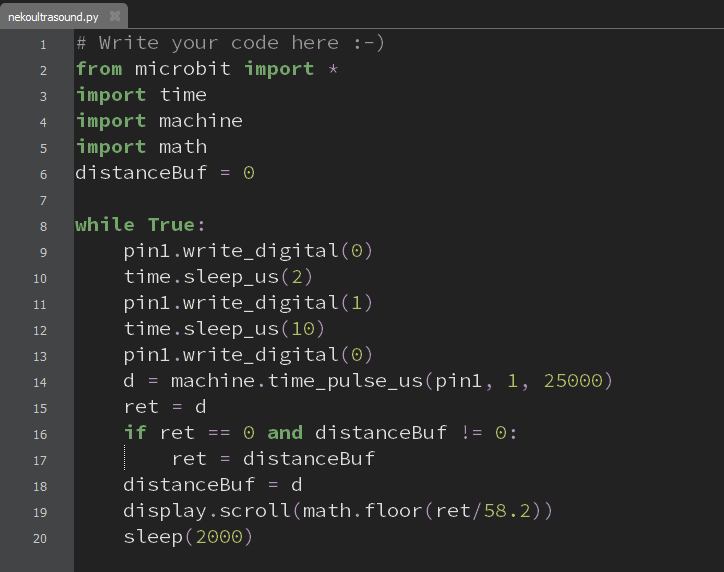
The logic works by writing a broadcast signal then measuring the time taken for the signal to bounce back to the sensor, multiplying this time by the speed of sound gives us the distance.