Industry 4.0 Robotic Arm
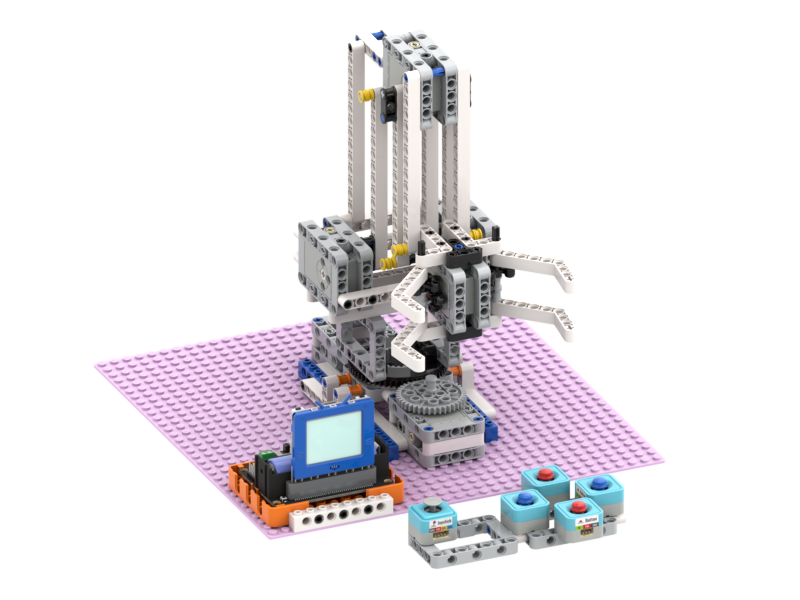
This Robotic Arm is built of plastic building blocks, it features 5 Geekservo 2KG servos.
Kit Contents
Robotbit Edu x1
18650 Lithium Battery x1
Geekservo 2KG Servos x5
Sugar Button Modules x4
Sugar Joystick Module x1
Building Blocks Set
Connecting Cables
Features
Powered by 2KG servos to ensure stability in operation
Mechanical structure allows students to learn mechanical engineering concepts
Improving engineering skills by hands-on construction of the robot arm
Brick-built structure allows flexibility in modifying to suit different scenarios
Building Instructions
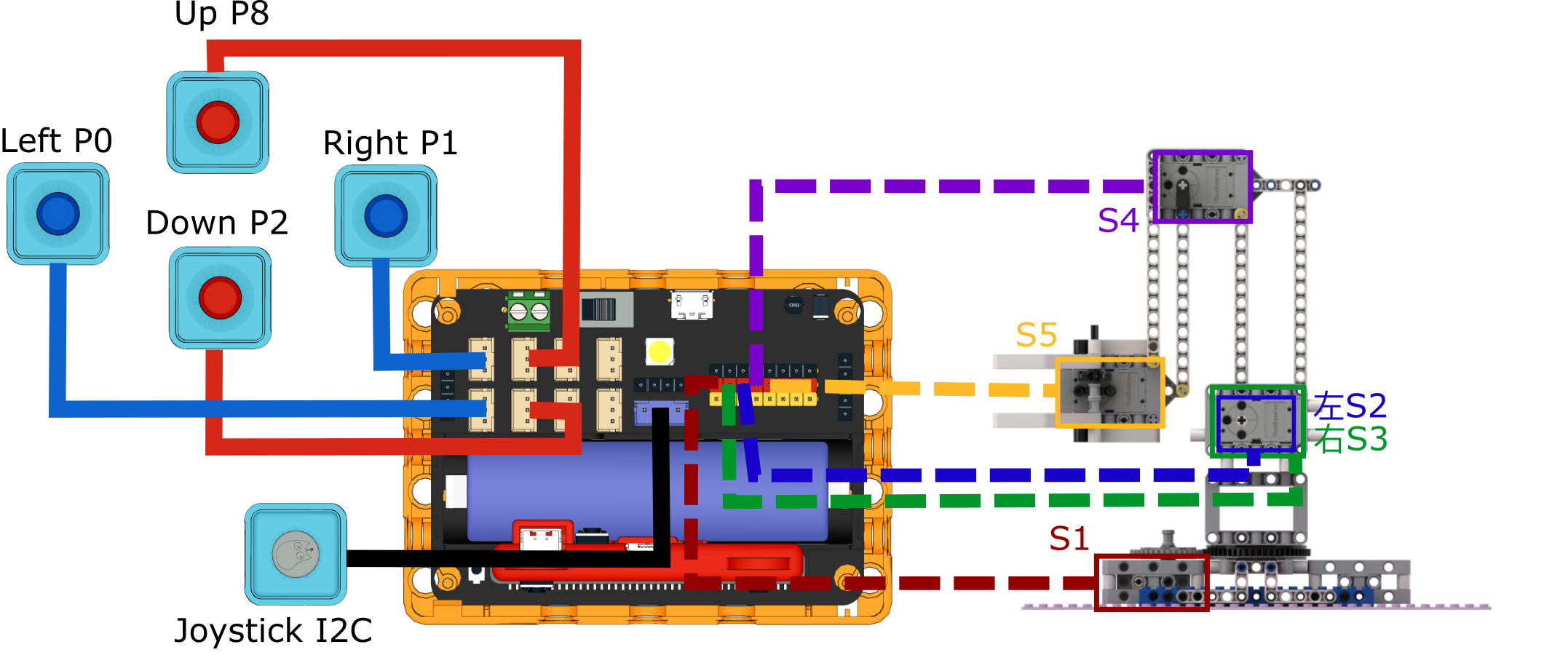
Sample Wiring Diagram
Robotbit EDU
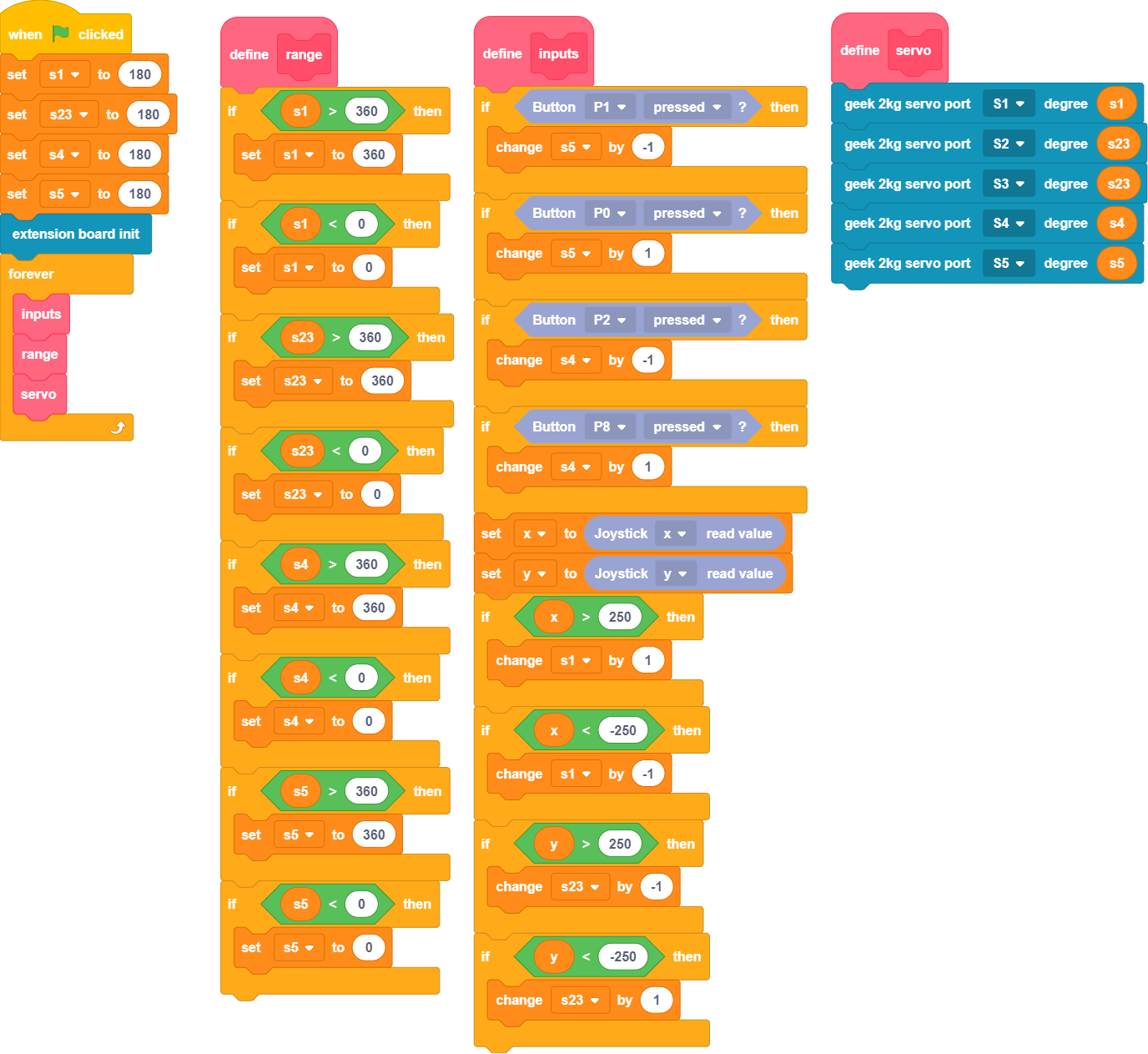
Sample Program
Micro:bit Sample Program
FutureBoard Sample Program
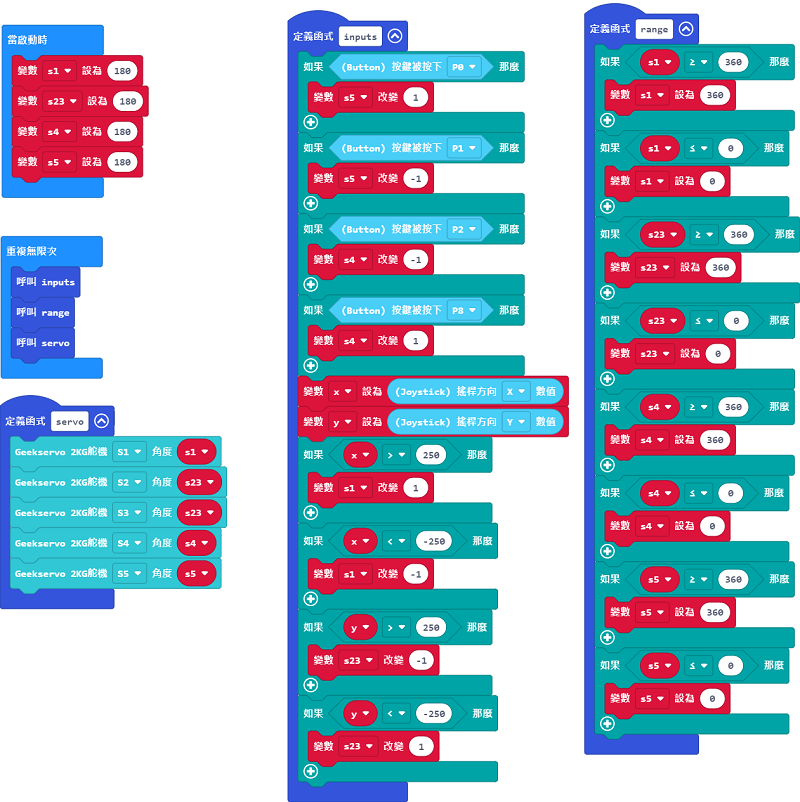
KittenBlock Sample Program
Python Sample Program
#/bin/python
from future import *
from sugar import *
import robotbit
x = 0
s1 = 0
s23 = 0
s4 = 0
s5 = 0
y = 0
def inputs():
global x,s1,s23,s4,s5,y
if Button("P1").value() == 0:
s5 += -1
if Button("P0").value() == 0:
s5 += 1
if Button("P2").value() == 0:
s4 += -1
if Button("P8").value() == 0:
s4 += 1
x = Joystick().value('x')
y = Joystick().value('y')
if x > 250:
s1 += 1
if x < -250:
s1 += -1
if y > 250:
s23 += -1
if y < -250:
s23 += 1
def range():
global x,s1,s23,s4,s5,y
if s1 > 360:
s1 = 360
if s1 < 0:
s1 = 0
if s23 > 360:
s23 = 360
if s23 < 0:
s23 = 0
if s4 > 360:
s4 = 360
if s4 < 0:
s4 = 0
if s5 > 360:
s5 = 360
if s5 < 0:
s5 = 0
def servo():
global x,s1,s23,s4,s5,y
robot.geekServo2kg(1, s1)
robot.geekServo2kg(2, s23)
robot.geekServo2kg(3, s23)
robot.geekServo2kg(4, s4)
robot.geekServo2kg(5, s5)
s1 = 180
s23 = 180
s4 = 180
s5 = 180
robot = robotbit.RobotBit()
while True:
inputs()
range()
servo()