Laser Distance Ruler

A ruler using a TOF sensor.
Building Instructions
Building Instructions(Right Click->Save As)
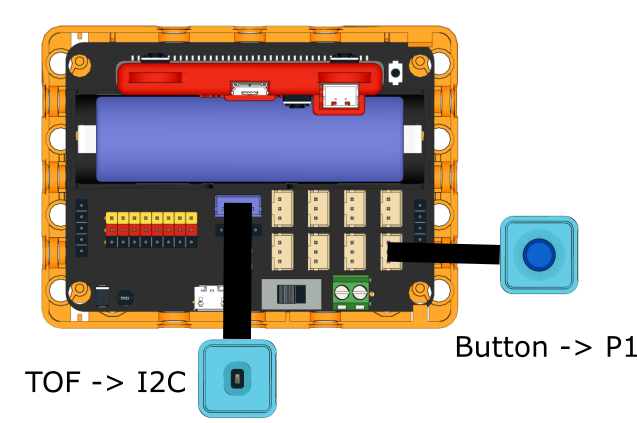
Sample Wiring Diagram
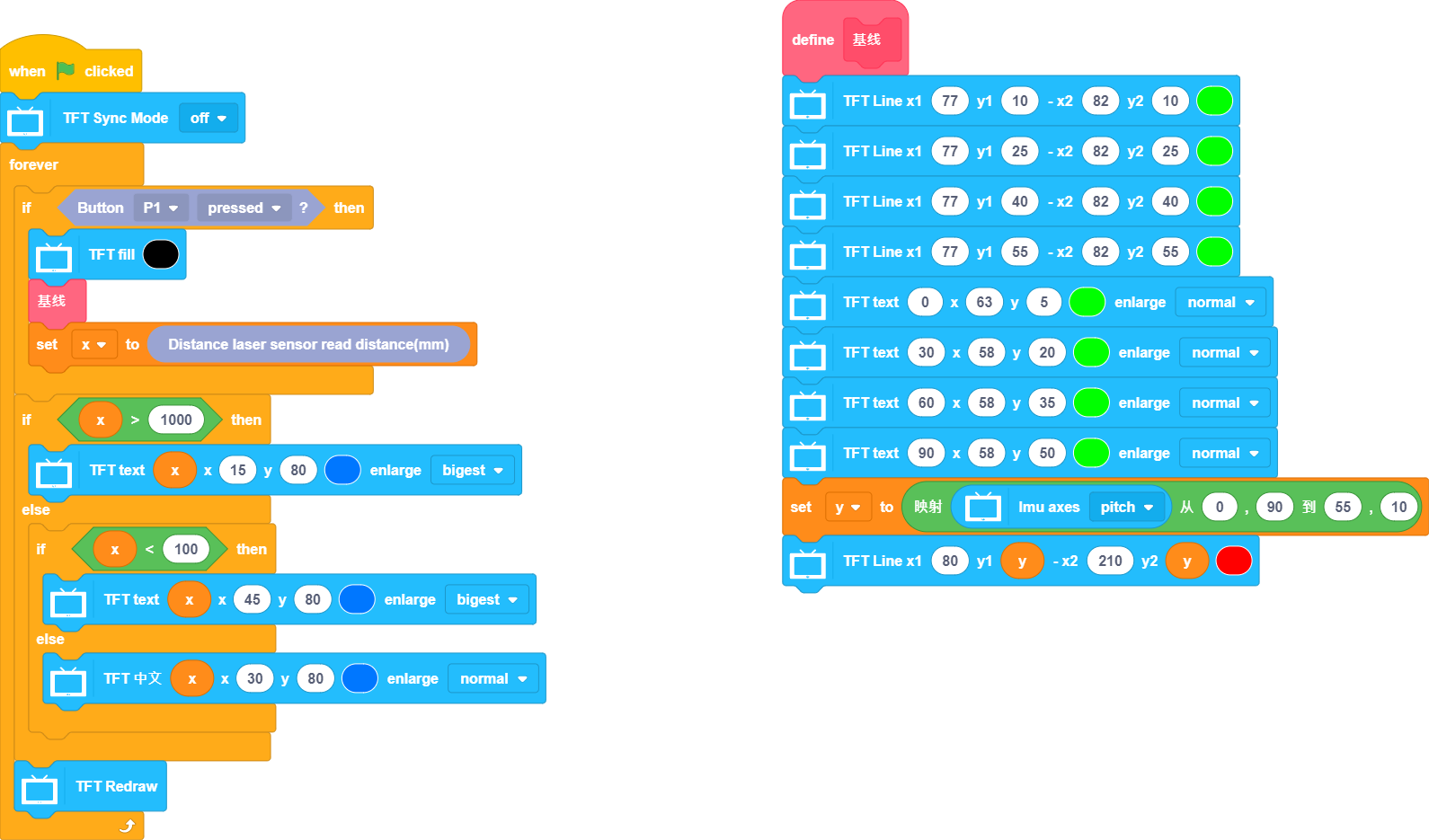
Sample Program
KittenBlock Sample Program
Python Sample Program
#/bin/python
from future import *
from sugar import *
y = 0
y1 = 0
y2 = 0
x = 0
def valmap(x, in_min, in_max, out_min, out_max):
return int((x-in_min) * (out_max-out_min) / (in_max-in_min) + out_min)
def baseline():
global y,y1,y2,x
screen.line(77,10,82,10,(0, 255, 0))
screen.line(77,25,82,25,(0, 255, 0))
screen.line(77,40,82,40,(0, 255, 0))
screen.line(77,55,82,55,(0, 255, 0))
screen.text(str('0'),63,5,1,(0, 255, 0))
screen.text(str('30'),58,20,1,(0, 255, 0))
screen.text(str('60'),58,35,1,(0, 255, 0))
screen.text(str('90'),58,50,1,(0, 255, 0))
y = (valmap(sensor.pitch(), 0, 90, 55, 10))
screen.line(80,y,210,y,(255, 0, 0))
screen.sync = 0
while True:
if Button("P1").value() == 0:
screen.fill((0, 0, 0))
baseline()
x = TOFDistance().value()
if x > 1000:
screen.textCh(x,15,80,3,(0, 119, 255))
else:
if x < 100:
screen.textCh(x,45,80,3,(0, 119, 255))
else:
screen.textCh(x,30,80,3,(0, 119, 255))
screen.refresh()
Program Instructions
Press the button, the Futureboard will display the distance measured.