RoboCatcher
Use the shield to protect the resources from the oppoents, it can also avoid obstacles automatically.
Building Instructions and Sample Programs
RoboCatcher-JoyFrog Controller
RoboCatcher-Robot(Joyfrog Controller)
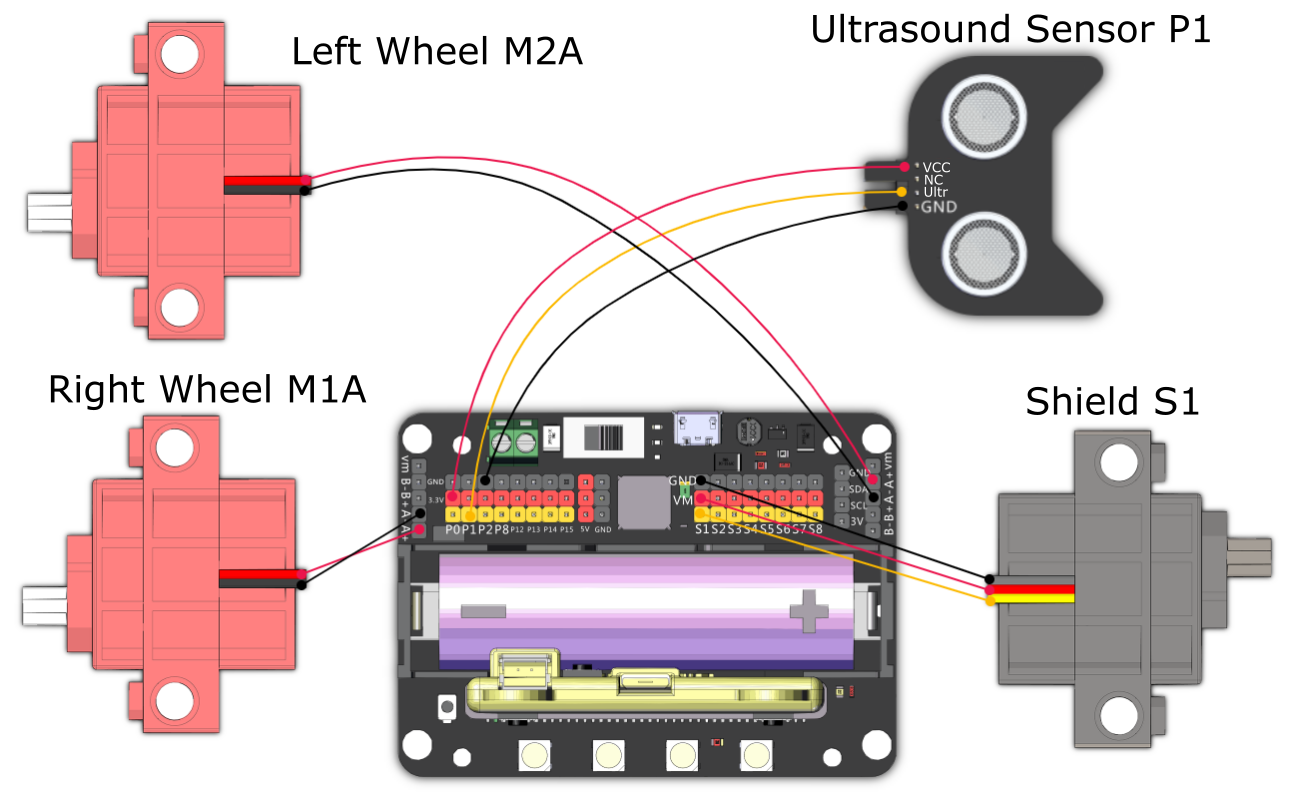
Sample Wiring
Operating the Robot
JoyFrog Controller:
The controller should show a heart icon when the power is switched on.
Use the joystick for movement, press A to put down the shield, press B to hold up the shield.
Press X to switch to Obstacle Avoiding mode.
Press Y to show the distance detected by the ultrasound sensor.
Microbit Controller:
The controller should show a heart icon when the power is switched on.
Use the accelerometer for movement, press A to put down the shield and hold up the shield.
Press B to switch to Obstacle Avoiding mode.。